|
||||
|
|
Моносфера Моноцикл — одноколесный велосипед — был бы исключительно элегантным и практичным средством передвижения, если бы не его малая устойчивость. В каждый момент седок должен определить направление, в котором он валится, и выруливать в сторону падения. Современная техника, однако, позволяет без труда автоматизировать балансировку: достаточно вспомнить военные самолеты, устойчивость которых в полете всецело зависит от работы бортовой вычислительной машины. Поэтому Дедал занялся разработкой самостабилизирующегося моноцикла, или, вернее, моносферы. Роль колеса будет выполнять пневматическая сфера диаметром около 30 см, верхняя часть которой входит в подвеску, снабженную двигателями и приводными фрикционами. Сверху укреплено седло, куда садится ездок. Акселерометры регистрируют любое отклонение от вертикали, и бортовой микропроцессор дает команду серводвигателям, которые вращают сферу в нужном направлении, предотвращая падение. При достаточно высоком быстродействии системы ездок будет чувствовать себя абсолютно уверенно, поскольку при автоматическом управлении отклонения моносферы от вертикального положения будут много меньше, чем в том случае, если бы ездоку пришлось самому управлять моносферой. Первоначально Дедал предполагал снабдить моносферу педалями, чтобы на ней можно было ездить, как на обычном велосипеде, управляя поворотами и торможением при помощи одной рукоятки, — как и велосипед, моносфера избавляет ноги седока от необходимости поддерживать его вес, так что вся мускульная сила идет на перемещение вперед, которое совершается легко и с высокой скоростью. Небольшой аккумулятор, подзаряжаемый от велосипедной динамки, будет питать электронику и серводвигатели, а также сможет обеспечивать кратковременную добавку мощности, например при движении в гору. Рассудив, однако, что человек на моносфере занимает едва ли больше места, чем просто стоящий человек, Дедал пришел к выводу, что моносфера — это нечто существенно большее, чем просто усовершенствованный велосипед. В конце концов, велосипед — это средство передвижения. Вы едете, куда вам нужно, а добравшись до места, привязываете велосипед к перилам и заходите в дом. Спешиваться с моносферы нет необходимости — на ней можно ездить везде: и на улице, и в помещении. Соответственно всегда можно найти электрическую розетку, чтобы подзарядить аккумулятор, что дает возможность создать полностью электрифицированную модель моносферы. Это дает весьма существенные преимущества. Во-первых, ездок может лавировать в толпе, не цепляя никого ногами. Во-вторых, управление моносферой становится простым и исключительно изящным. Ездок просто наклоняется в ту сторону, куда необходимо повернуть. Моносфера послушно выруливает в направлении наклона, чтобы выправить крен, и продолжает катиться в ту же сторону, пока ездок не наклонится в другую сторону для поворота или не откинется назад, желая затормозить. При некотором навыке балансировка на моносфере станет полностью рефлекторной, как и умение держать равновесие на велосипеде. Ездок сможет двигаться на своей моносфере вперед, назад и вбок, даже не задумываясь, как именно он это делает. Это позволит преодолеть все неудобства и недостатки благоприобретенной способности к прямохождению, поскольку универсальная моносфера полностью снимет, наконец, нагрузку с человеческих ног. Люди на моносферах будут ездить по автострадам и беседовать в коридорах учреждений. Они станут прогуливаться на них по музейным залам — и онемевшие ноги более не будут мешать им наслаждаться произведениями искусства. Никто не будет валиться с ног в пивном баре независимо от количества выпитого. Люди начнут с легкостью взлетать по крутым лестницам, а в танцах появятся невиданные механизированные пируэты. Надобность в стульях и табуретках отпадет; инвалиды и паралитики смогут вернуться к полноценной жизни. Придется только добавить новый раздел в правила дорожного движения. New Scientist, May 18, 1978 Из записной книжки Дедала Главная задача — «научить» моносферу подниматься по лестницам. Для этого необходимо предусмотреть возможность совершать на ней небольшие прыжки. Поскольку седло в любом случае придется устанавливать на пружинной подвеске (например, на телескопическом амортизаторе), в стойку седла можно вмонтировать возвратно-поступательный электродвигатель, ход которого выбирается с учетом максимальной высоты ступеньки (скажем, 30 см). При нормальном движении седло удерживается пружиной в среднем положении. Когда моносфера приближается к ступеньке, то — либо по команде седока, либо автоматически — выполняется следующая последовательность действий: 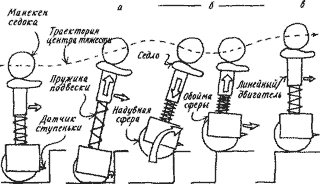 а. Линейный электродвигатель выдвигает стойку седла на полную высоту. Если ограничить ускорение величиной а = 0,5g ~ 5 м/с², то вертикальная составляющая скорости в верхней точке (т.е. на расстоянии l = 0,15 м) составит v = (2аl)1/2 = (2×5×0,15)1/2 = 1,25 м/с и будет достигнута за время t = (2l/а)1/2 = (2×0,15/5)1/2 = 0,25 с. Если принять максимальную массу седока равной 100 кг, то мощность, которую должен развить электродвигатель, составит Р = 100 × 5 × 0,15 : 0,25 = 300 Вт; аккумуляторы вполне способны выдержать такую кратковременную перегрузку (напомним, что мощность равна произведению силы на расстояние, деленному на время). Одновременно сила реакции опоры сожмет пневматическую сферу. б. Теперь седок продолжает движение вверх по инерции. Его центр массы движется по параболе, причем горизонтальная составляющая скорости равна скорости движения моносферы перед ступенькой, а максимальная высота над первоначальным уровнем центра масс составит h = v²/2g = (1,25)²/20 = 0,075 м, после чего начнется движение вниз. Во время этого симметричного взлета — падения вертикальная составляющая скорости будет меняться от +1,25 м/с до -1,25 м/с за время t = Δv/g = (2×1,25)/10 = 0,25с. В этот промежуток времени моносфера не испытывает действия веса седока. Дойдя до верхней точки, электродвигатель немедленно начинает движение в обратном направлении, сжимая пружину. За счет этого, а также вследствие упругости пневматической сферы моносфера «вспрыгнет» под седоком на ступеньку. Чтобы она могла подпрыгнуть на высоту 30 см, необходима начальная скорость v = (2gh)1/2 = (2×10×0,3)1/2 = 2,5 м/с (что вполне реально); прыжок займет время t = v/g = 2,5/10 = 0,25 с — ровно столько, сколько времени имеется в нашем распоряжении. в. Моносфера преодолела ступеньку, поднявшись на высоту 30 см. Линейный электродвигатель находится в нижней точке хода, так что седло — вместе с седоком — поднялось только на 15 см. Теперь двигатель выключается, и сжатая пружина амортизатора возвращается в нормальное среднее положение, поднимая седло на оставшиеся 15 см. Если ступенька одна, то на этом программа заканчивается, если же ступенек несколько, то вся последовательность действий повторяется необходимое число раз. Программа для совершения прыжка записана в памяти микропроцессора, управляющего движением сферы, и необходимая последовательность действий выполняется по команде ездока или при срабатывании датчика, определяющего наличие ступеньки. Выполнение аналогичных действий в обратной последовательности позволит моносфере спускаться по лестницам. Примечание. Для подъема по лестнице необходима некоторая минимальная горизонтальная составляющая скорости. Аппарат должен перемещаться вперед на расстояние, равное одному радиусу пневматической сферы (мы приняли его равным 15 см), за время, которое занимает прыжок (0,5 с); в противном случае при подъеме на ступеньку сфера (вместе с ездоком!) опрокинется назад. Отсюда получаем, что минимальная скорость перед прыжком равна hv = l/t = 0,15/0,5= 0,3 м/с. |
|
||
|
Главная | В избранное | Наш E-MAIL | Добавить материал | Нашёл ошибку | Вверх |
||||
|
|
||||